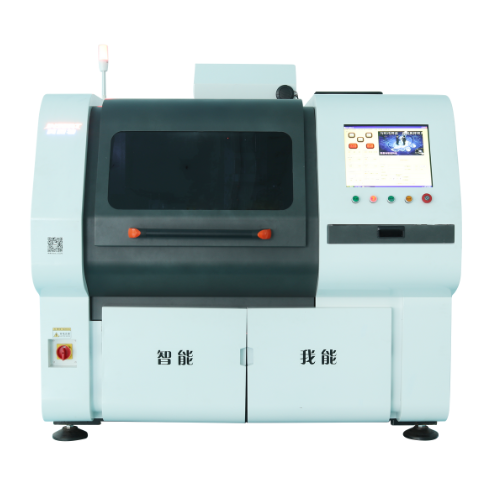






Pick & Place Machine
PCB SMT Machine Supplier
PCB SMT Machine Supplier
LED Bulb /SMD Chip Manufacturing Machine High Professional Automatic PCB SMT Machine Supplier
- Theoretical speed: 18000 points per hour
- Plugin direction: 0-360 degrees with increments of 1 degree
- Lead span: Double spacing 2.5mm/5.0mm/7.5mm/3.0mm/3.5mm/10mm/15mm optional
- Substrate size: minimum 50mm * 50mm, maximum 400mm * 460mm (expandable)
- Substrate thickness: 0.79-2.36mm
- Component specifications: maximum height of 23mm, maximum diameter of 13mm
- Componenttypes:capacitors/transistors/triodes/LEDlights/button
- switches/resistors/connectors/coils/potentiometers/fuse holders/fuses, etc.
- Vertical braided packaging materials
- Component lead trimming length: 1.2mm-2.2mm (adjustable)
- Component lead bending angle: 5-35 degrees (adjustable)
- Number of material stations: 20 material stations (optional 10-100 stations)
- Mechanical dimensions (length * width * height): 1900mmx1600mmx1800mm
- Material station size: 1200mmx1000mmx1410mm
- Machine weight: 2100KG
- Power supply/power: 220V, AC (single-phase) 50/60HZ, 2.0KVA/1.6KW (energy-saving type)
- System protection: Built in soft protection
- Voltage/gas consumption: 0.6-0.8Mpa/0.3 cubic meters per minute
- Operating environment temperature: 5-25 degrees Celsius
- Machine noise: 65 decibels
- Hole position correction method: machine vision system, multi-point MARK visual correction
- Drive system: AC servo, AC motor
- Data input method: USB interface input (EXCEL document format)
- Control system: Chinese operating interface (WINDOWSXP system control platform) LCD display
- Component density: The distance between component bodies should be 1mm, and the distance between surface mount components and holes should not be less than 3mm
- Workbench operation mode: clockwise and counterclockwise
- Circuit board conveying method: automatic up and down board from left to right, right to left
- Display: Front and Rear